sea
Unmanned minehunting: the vessels leading the way to autonomous operations
Unmanned minehunting vessels could reduce the human involvement in dull, dirty and dangerous mine clearance operations. Harry Lye takes a look at some of the pioneering unmanned underwater vehicles in development for the Royal Navy and the US Navy.



// The US Navy’s unmanned minehunting programme uses Textron Systems’ Common Unmanned Surface Vehicle. Image Textron
In March 2020, the UK’s Royal Navy began unmanned minehunting operations, using unmanned surface vessels and a mix of submersibles, under the guidance of Project Wilton. The project is an effort to develop future mine countermeasure capabilities (MCM) for the Royal Navy, named after HMS Wilton, an experimental warship that was the world’s first to use a glass-reinforced plastic hull. At the time, the ship – much like the project now named after it – was seen as a bridge between the past and future.
Project Wilton: a stepping stone for autonomous minehunting
At the moment, vessels operated under Project Wilton are seen as the stepping stone between today’s manned minehunting technology and the remotely controlled or fully autonomous minehunting vessels of the future.
Building on years of work from the navy and Dstl, the current vessels are being used to conduct survey missions from HMNB Clyde.
When the navy announced the move, maritime capability assistant chief of staff Commodore Mike Knott said: “With equipment and personnel now operating on the Clyde, the transition to widespread use of autonomous systems in mine countermeasures is becoming a reality and places the Royal Navy MCM community at the cutting edge. This exciting project handover is a real step forward in realising our ambition to make minehunting safer and more effective through the use of autonomous and robotic technology.”
“The Royal Navy’s ultimate goal is to develop a fully autonomous and flexible mine countermeasure system that can be deployed across the surface fleet.”
With the Royal Navy’s existing fleet of Hunt and Sandown-class minehunter vessels due to exit service in the next decade, with no current funds or plans for their replacement, unmanned systems could offer a cheaper way to maintain that capability.
One of the key vehicles in this programme is Atlas Elektronik’s ARCIMS, designed for minesweeping, minehunting, and mine disposal, which first caught the navy’s attention during Exercise Unmanned Warrior in 2016.
The Royal Navy’s ultimate goal is to develop a fully autonomous and flexible mine countermeasure system that can be deployed across the surface fleet. The ARCIMS system is an early example of this, as it can be packaged into a container, allowing it to be transported by low-loader or containerised and put on a frigate, destroyer, or patrol vessel.

Atlas Eletronik’s ARCIMS is one of the key vehicles used in the Royal Navy’s unmanned minehunting programme.
The future of unmanned minehunting technology
Explaining the development of unmanned vessels for minehunting, Royal United Services Institute (RUSI) research fellow for sea power Dr Sidharth Kaushal told us: “UUVs are in some ways a natural progression on the remotely controlled minehunting vessels like the SLQ-48 that are controlled from the Avenger-class MCM vessel in order to gather data and diffuse threats without risking lives.
“The big advantage of unmanned vessels is the fact that as autonomous vessels with certain decision-making protocols [built in] do not absorb the attention of crew members, and can range further from the mothership that launched them because there does not need to be persistent control. Moreover, severing the links between UUVs and the mothership that launched them is less likely to compromise their functionality as compared to a remotely controlled vehicle.”
Autonomy is considered a way of reducing personnel fatigue during operations. Minehunting is a laborious process and having USVs and UUVs on task would take some of the strain off sailors and allow them to focus on other aspects of the mission.
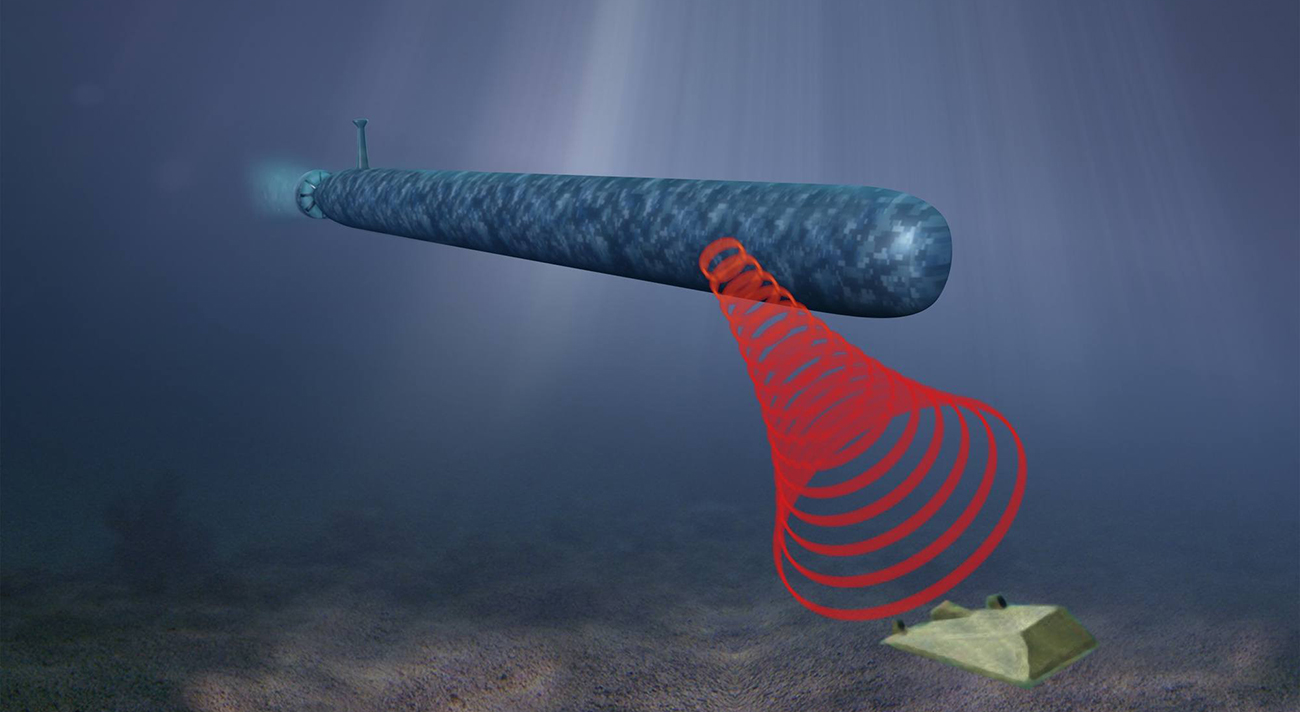
General Dynamics Mission Systems’ Knifefish UUV is part of the Littoral Combat Ship’s mine countermeasure mission package. Image: General Dynamics
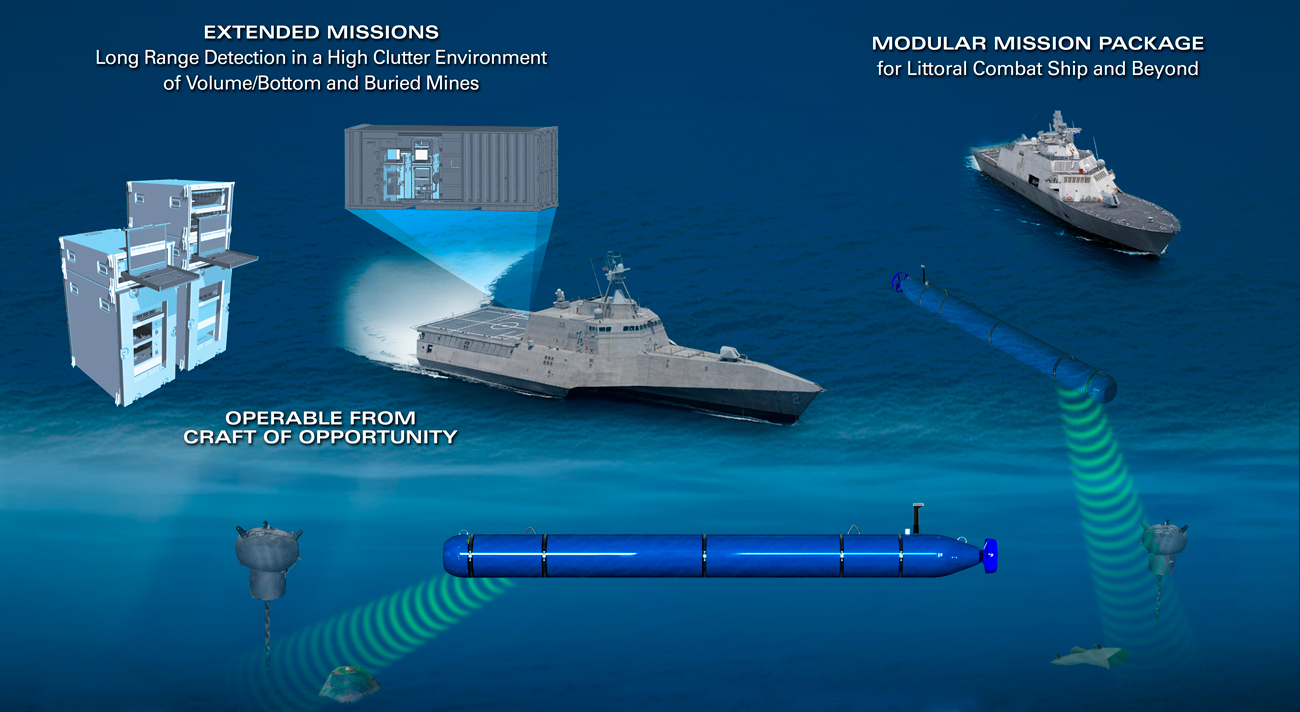
The Knifefish UUV can be integrated into different ships and mission packages. Image: General Dynamics
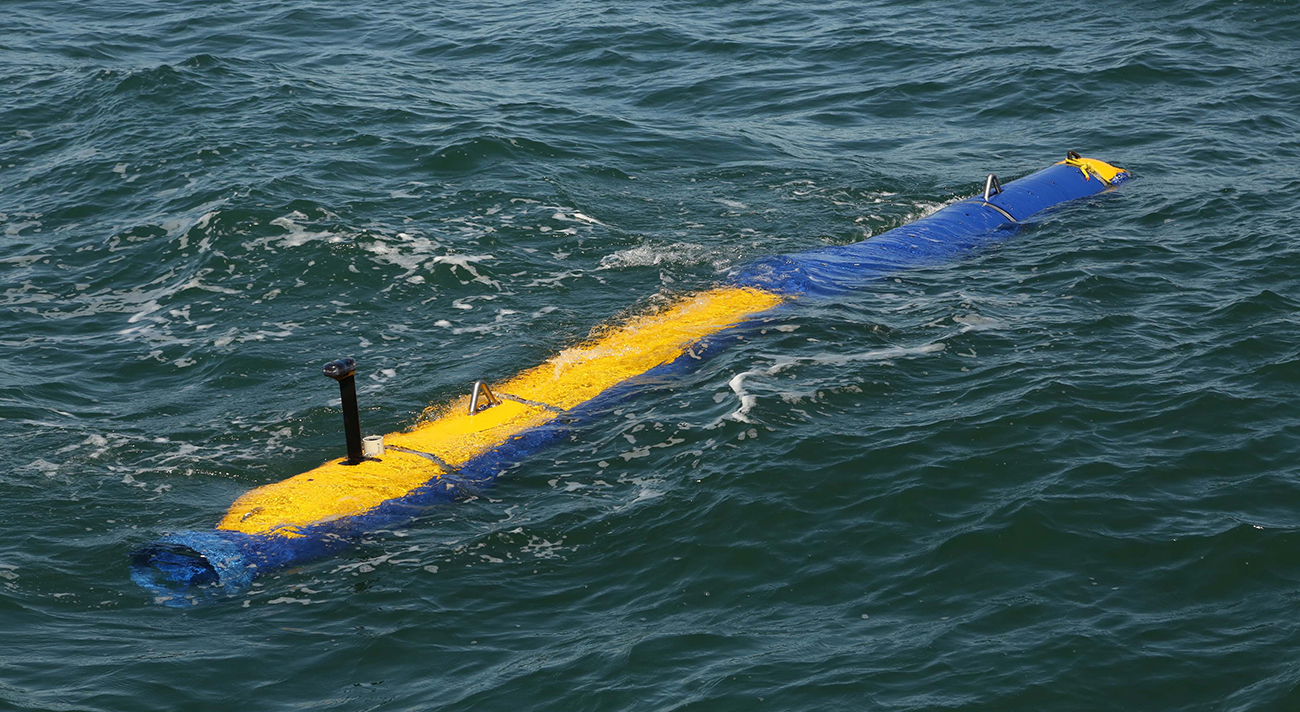
The Knifefish UUV during testing. Image: General Dynamics
Unmanned minehunting systems leading the way
A number of UUVs for minehunting have already passed initial operating capability (IOC) and present a relatively cheap way for navies to expand the sensor capabilities of a minehunting vessel.
One of these systems is the General Dynamics Mission Systems’ Knifefish, part of the Littoral Combat Ship’s (LCS) mine countermeasure mission package. GD touts the system’s ‘plug and play’ capability as an advantage as it allows for easy integration into ships and mission packages.
“UUVs like the Knifefish, which have passed initial operating capability, represent a low-cost ($2m) tool with which to expand the reach and offboard sensor capability of a given minehunting vessel, as they can, in the right circumstances, pass data back,” Kaushal explains.
“As such, they represent a relatively cheap tool with which to prosecute minehunting missions more efficiently with a large number of UUVs, making the task less labour-intensive and reducing the risk of loss of life. Given that the Knifefish has passed IOC, I would expect the trend towards using UUVs for minehunting to accelerate in a fairly short period of time.”
“UISS consists of a mine countermeasure unmanned surface vessel and a towed minesweeping package capable of detecting an array of different mines.”
Elsewhere in the US, the US Navy’s Unmanned Influence Sweep System (UISS) programme, based on Textron Systems’ Common Unmanned Surface Vehicle (CUSV) will soon enter low-rate initial production (LRIP), bringing another unmanned minehunting platform closer to service.
Like Knifefish, UISS is designed to operate as part of the LCS MCM package, expected to enter service as soon as 2021. UISS consists of a mine countermeasure unmanned surface vessel and a towed minesweeping package capable of detecting an array of different mines.
With IOC already achieved for some systems, and a host of others in development, the path is set for a more widespread adoption of advanced unmanned and autonomous minehunting technology.

The US Navy’s will operate Textron’s Common Unmanned Surface Vehicle as part of its LCS mine countermeasure package. Image: Textron






Share this article





