UNDERWATER SURVEILLANCE
Seabed warfare is a ‘real and present threat’
Seabed warfare has moved on from hydrography and mine clearance as the sea floor infrastructure has exploded in scale. Andrew Salerno-Garthwaite reports.
Seabed warfare truly began in the 1960s with operations such as the United States Navy's Operation Ivy Bells, a cooperative effort by the US Navy, CIA, and NSA to wiretap Soviet undersea communication links during the Cold War.
Since then, the size of infrastructure networks on the seafloor and the dependence of civic society on these networks have exploded. Never-before-seen densities of pipelines, optical fibre, and power cables traverse the ocean, allowing data transfer in telecommunications and energy flows the distribution of gas, oil, and electricity.
The security concerns are not in any sense theoretical. “There is a real and present threat out there today,” said Chris Lade, Saab sales manager and a former UK Royal Navy mine clearance diver, during a briefing on seabed operations at Euronaval conference Paris in October.
The damage to the Nordstream pipelines at the end of September is widely publicised, but less well known is the loss of a major piece of the Norwegian sensor system in January, one of four seabed infrastructure loss occurrences this year alone.
“[Seabed warfare] is extremely difficult to defend against and no country on earth is well-equipped or prepared to do the defending,” said H.I. Sutton, an independent naval researcher and author of ‘Covert Shores: The Story of Naval Special Forces Missions and Minisubs’, highlighting the contrast between defensive operations and expeditionary, offensive operations. “It can often be done in ways which are not attributable, which adds a hybrid warfare dimension,” continued Sutton, speaking of the threat from offensive operations.

// Concept illustration of the Near Future Submarine. Credit: Fincantieri
Navies modernising for the challenge
In February, the French Navy unveiled a new strategic seabed warfare doctrine, while in May, the UK Royal Navy met with private operators in the undersea, indicating that navies in the area are studying seabed warfare vulnerabilities. Due to the experience gained building the infrastructure developed by the oil and gas industry, it is thought that the commercial sector has primacy in ocean floor operations at depths beyond the continental shelf.
“The civilian sector, such as offshore oil and gas, are often better equipped than navies,” continued Sutton, “but they tend not to be set up for covert action. In Russia the lines between civilian and navy are blurred, much more so than in [the] West.”
In November the UK Ministry of Defence (MoD) announced that it was prioritising the procurement of two Multi-Role Ocean Surveillance (MROS) ships. “The suspected sabotage of the Nord Stream pipelines in late September has brought these vulnerabilities in sharp focus,” said James Marques, associate aerospace, defence and security analyst at GlobalData, “prompting the MoD to speed up delivery of the MROS capability.”
First announced in March 2021, the first ship is now scheduled to enter the fleet in January 2023.
The MROS ships will bring deep-diving operations back into the mission set of the Royal Navy’s Hydrographic squadron, building on the capabilities of its multiple surveillance ships. Its inclusion in the Royal Fleet Auxiliary is intended to advance British security by monitoring and protecting seabed communications cables and energy pipelines, and the ships are expected to carry Autonomous Underwater Vessels (AUV) for this purpose.
The Royal Navy quickly followed this statement with another, announcing on 1 December that it had made an order for its first uncrewed submarine, Cetus. Built to covertly travel the oceans, the Cetus will monitor and listen for ships or submarines that may endanger the Fleet or vital pieces of infrastructure including deep-sea cables and pipelines.
The vessel stands in contrast to the autonomous systems the Royal Navy has experimented with over the last decade in regard to its size. The latest addition will be “the length of a bus” at 12m, according to a Royal Navy press release. This is far larger than the small off-the-shelf AUVs currently in operation for mine hunting, but still able to fit inside a shipping container for transport anywhere in the world.
Without disclosing the full extent of its operational capabilities, the Royal Navy release stated that the “unarmed battery-powered craft will be able to dive deeper than any vessel in the current submarine fleet and cover up to 1,000 miles in a single mission”.

[Russia is] the most capable nation to conduct seabed operations today
- Chris Lade, Saab
Russia is “the most capable nation to conduct seabed operations today,” according to Lade. He explained that Russia has a specific directorate for deep sea operations, known as GUGI, operating through the Russian Army and manned by Spetsnaz special forces.
The Russian fleet includes a variety of subsurface boats as well as highly capable oceanographic survey vessels. It has two mothership submarines, the largest based on an Oscar-class submarine, while the other is a derivative of earlier Delta-class submarines. These serve as the motherships for the Losharik minisub, Harpsichord AUV and Poseidon nuclear torpedo systems, providing a range of flexible applications and threats.
“They do seabed operations, and that’s a range of things. They can lay sensors, they can interdict other people’s infrastructure, they can survey, they can do the whole gambit of what you might want to do on the seabed. So, there is a real and present threat out there today,” said Lade.
Defensive approaches for protecting seabed infrastructure
From discussions Saab has had with a range of different nations, there is initial capability to be able to act defensively. Lade speculates that one solution against threats to infrastructure can be sourced from the world of mine warfare. As a Royal Navy mine clearance diver, he was familiar with approaches to protecting convoys by following the route of passage and surveying the seabed, returning intermittently to resurvey and determine if any change had occurred.
A derivative of this for protecting seabed infrastructure would be to survey, for example, an entire pipeline, with a mind to returning after a period of time to reassess and determine if any interdiction has occurred. This principle extends to setting up sensors along the pipeline as part of an alarm system, triggered when covert action is being taken.
When addressing defensive and offensive operations, the ability to monitor cables is highly relevant. If a navy's operating platforms can dwell on the seabed, it is able to patrol the seabed as soon as it departs its home base - and in the case of AUVs or ROVs, this base would be a garage housed on the seabed.
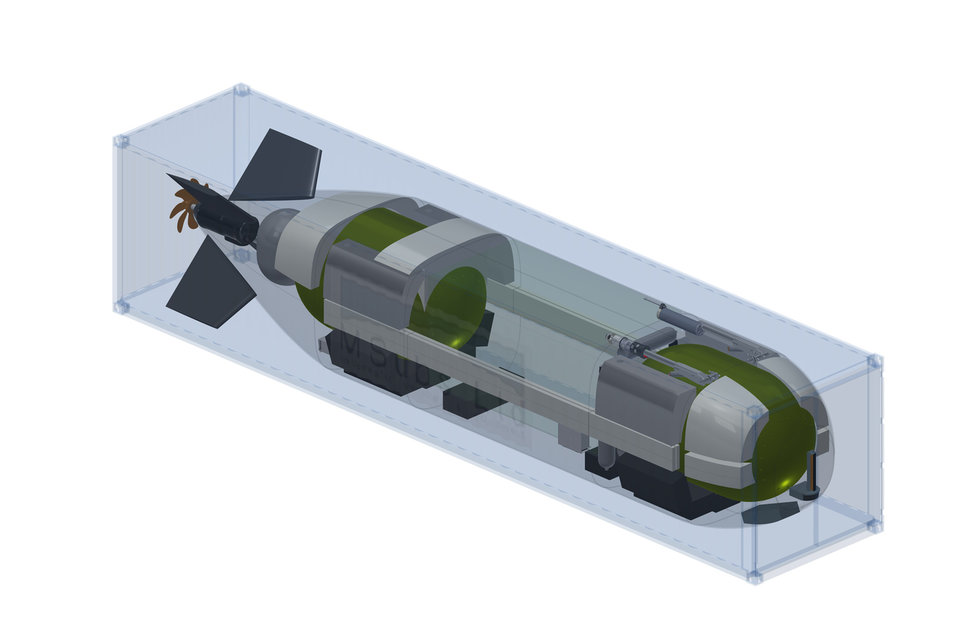
// Cutaway of CETUS, the Royal Navy’s first autonomous submarine, described within a 40ft cargo container. Credit: UK MoD
Such a garage has restrictions. The first is that with time, biological and underwater growth will accumulate on the garage and will need to be removed. This will depend on its location and the region of the ocean it is in, but generally the Remote Operated Vehicle (ROV) or AUV will have a six-month-periods dwelling in its garage at depth, and for the same reason the AUV or ROV may have to return.
Two further components are critical to vessels housed on the seabed, both stemming from the need for communications. Firstly, a method of communication is required to interact with the AUV or ROV in real time, or else to give it signals so that it may complete its mission autonomously. Secondly a communications connection is necessary to download the data that the vessel has acquired. Where it can connect to an existing communication network, these problems can be overcome in a straightforward manner, and this is often the case with defence activity.
However, when operating in an offensive position in a location where it could not connect to shore-power communications, it becomes necessary to employ a communications buoy to send its acquired data back to headquarters.
Challenges from the seabed environment
In the strategic paper produced by the French Navy in February of this year, and in conversations Saab reports having had with the UK Royal Navy and the Royal Australian Navy, the expressed depth of attainment desired is to operate at 6000m below sea level. With few exceptions, current commercial systems predominantly operate to 3000m. This environment offers some distinctive challenges for the AUV and ROV systems that are principally employed for this work.
During operations themselves, visibility and acoustics are environmental factors that navies have to concern themselves with when operating at the seabed level. Depth can diminishes both visibility and the use of acoustics, and additionally the salinity the water can have an effect on communications and the application sonar.
The depth of operations also imposes limitations on design, partly from the increasing pressure as the vessels depends, but also because of the challenge of conveying power down to the level of operations. Syntactic foam is a component common to many ROVs at these depths. It is included to retain buoyancy and takes advantage of the non-compressible characteristic of the material.
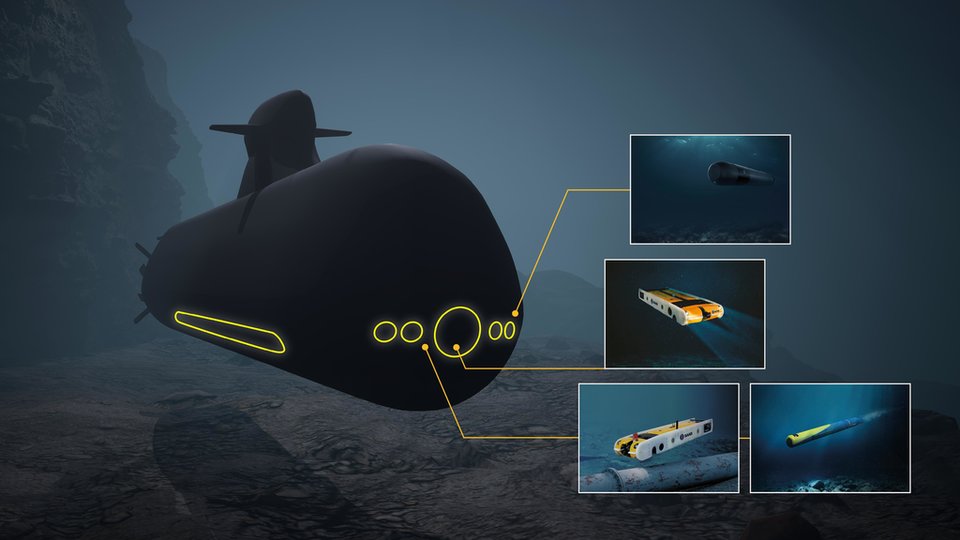
// Remote and autonomous undersea warfare capabilities are being integrated onto newly-developed crewed-platforms. Credit: Saab
However, the foam becomes heavier as the depth and pressure increase, demanding more from the system in terms of power to operate effectively, requiring a heavier system that demands more power in turn, in a vicious cycle. Compounding this, the power that an ROV draws on often comes from a tether to a surface vessel, presenting challenges to the descending ROV as the cable becomes more lossy with the greater length.
For tethered ROVs, complications can also arrive via the conditions being experienced by the surface vessel. Weather is an often under-appreciated factor in considering seabed warfare, but poor conditions above the surface can potentially prevent the surface vessel from operating systems below the water. Similarly, the current of the water can seriously impact the capability for activity at depth, in the use of both AUV and ROVs, with or without a tether. “The maximum current the diver can be effective is probably half a knot,” said Lade.
// Main image: Royal Navy Hydrographic Vessel HMS Scott at anchor near Port Lockroy in Antarctica. Credit: POA(Phot) Ray Jones, Crown Copyright/UK MoD 2011